MIT-iň täze ulgamy: Robotlar çylşyrymly datçiksiz, diňe wideo arkaly özlerini dolandyrmagy öwrenýärler
03.07.2025 | 17:20 |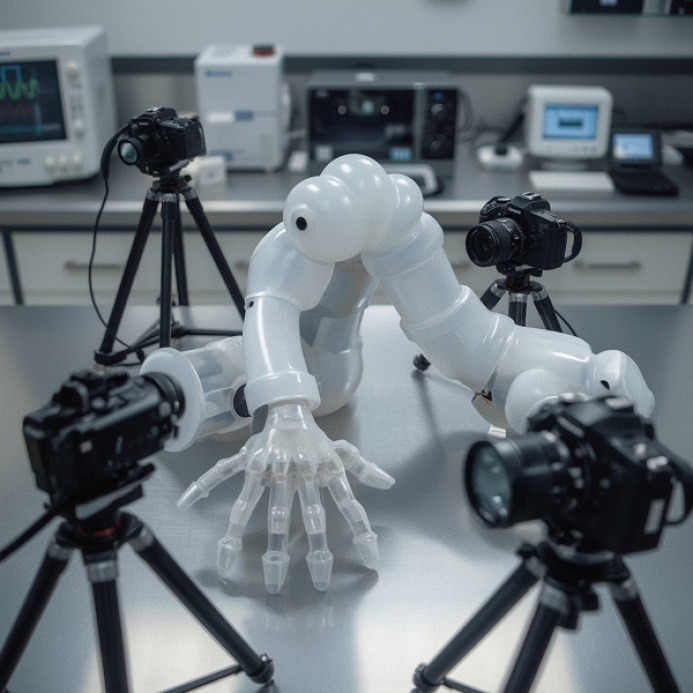
Massaçusets Tehnologiýa Institutynyň (MIT CSAIL) alymlary robotlara diňe kamera arkaly öz bedenlerini dolandyrmagy öwredýän “Neýron Ýakobiýan meýdanlary” (NJF) täze ulgamy döretdiler. Bu usul çylşyrymly datçikleriň we öňünden programmirlemegiň zerurlygyny aradan aýyrýar.
NJF ulgamy robot tehnikasynda adaty çemeleşmeleri üýtgedýär. Köp datçikli berk gurluşlaryň ýerine robot özüniň beden modelini diňe wideo synlaryna esaslanyp döredýär. Bu usul, esasanam ýumşak we şekilini üýtgedýän robotlar üçin aýratyn ähmiýetlidir. Taslamanyň ýolbaşçysy Siže Lester Li şeýle belleýär: “Bu iş — robotlary programmirlemekden olary öwretmäge geçişdir.”
Robotlar tötänleýin hereketleri edip, netijesini kamera arkaly synlap öwrenýärler. NJF ulgamy robotyň geometrik gurluşy bilen dolandyryş signalyna beren jogabynyň arasyndaky baglanyşygy kesgitleýän neýron torundan peýdalanýar. Bu öwreniş doly awtonom bolup, adam tarapyndan goşulyşmagy ýa-da öňünden robot barada maglumatlary talap etmeýär. Okuw tamamlanandan soň bolsa roboty dolandyrmak üçin diňe bir kamera ýeterlikdir.
Ulgam dürli görnüşli robotlarda, şol sanda ýumşak we berk robot manipulýatorlarynda, üstünlikli synagdan geçirildi. NJF ulgamy amaly taýdan giň mümkinçilikleri açýar: robotlar gymmatly datçiklere mätäç bolmazdan oba hojalygynda, gurluşyk meýdançalarynda we beýleki dinamiki gurşawlarda takyk iş alyp baryp bilerler. Geljekde alymlar bu ulgamy hatta smartfon kamerasynyň wideosy arkaly hem öwrenmäge uýgunlaşdyrmagy meýilleşdirýärler, bu bolsa tehnologiýanyň ornaşdyrylmagyny has hem ýeňilleşdirer.
ORIENT